Project Overview
The Problem
Parkinson’s disease causes involuntary tremors, making daily activities like eating difficult and messy, leading to frustration and loss of independence.
Our Solution
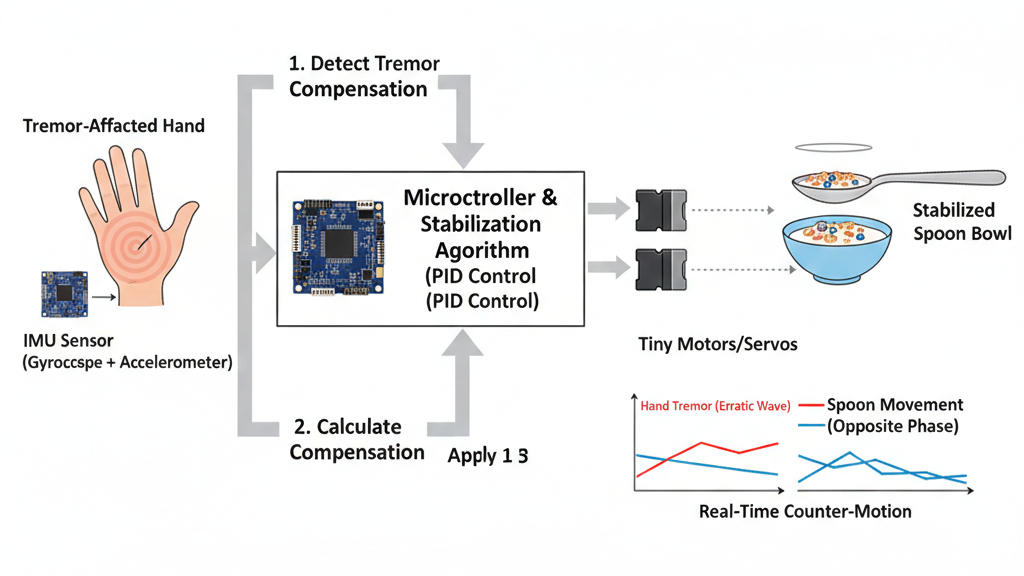
We developed a low-cost self-stabilizing spoon that compensates for hand tremors in real-time. By utilizing an MPU6050 sensor and precise servo control, the spoon maintains a steady level position.
- Core Concept: PID-based active stabilization.
- Hardware: Arduino Nano, MPU6050, MG90 Servos.
- Goal: Affordable assistive technology.